

يمكن للروبوتات المستقلة تفحص محطات الطاقة النووية، وتنظيف التسرّبات النفطية في المحيط، ومرافقة الطائرات المقاتلة إلى القتال، إضافة إلى استكشاف سطح المريخ. وعلى الرغم من جميع مواهبها، إلا أنها لا تزال غير قادرة على صنع فنجان من الشاي حتى الآن.
هذا لأن مهاماً كإشعال الموقد وإحضار إبريق وإيجاد الحليب والسكّر تتطلب قدرات إدراكية حسية تعتبر إلى الآن خيالية لمعظم الآلات.
من بين هذه المهام القدرة على استشعار الأجسام ثلاثية الأبعاد. رغم أنه من السهل نسبياً للروبوتات رؤية الأجسام بواسطة الكاميرات وغيرها من أجهزة الاستشعار، فإن تفسير ما تراه في لمحة واحدة أكثر صعوبة.
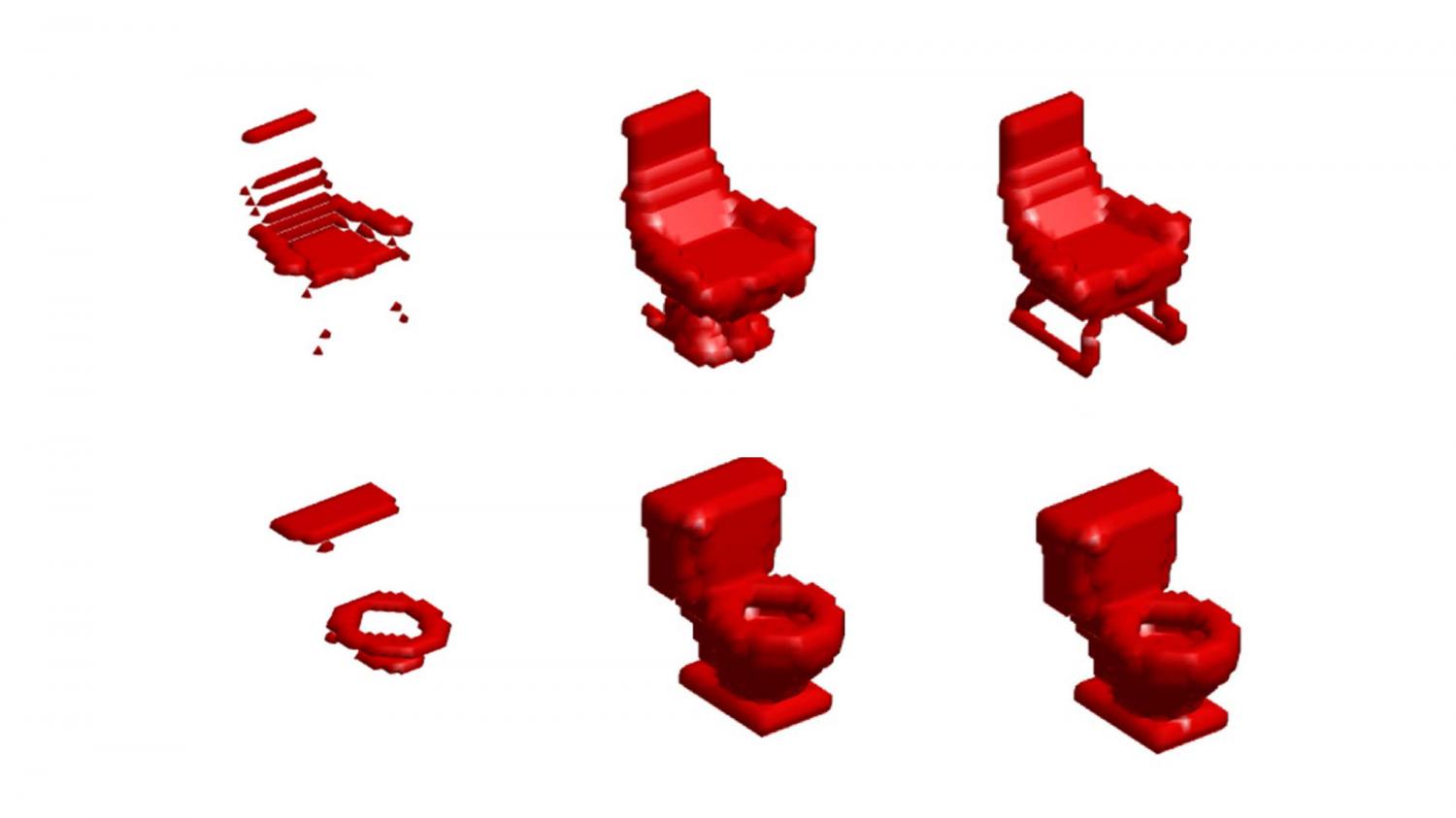
خوارزمية جديدة يمكنها تخمين ماهية الجسم وشكله الكلي ثلاثي الأبعاد عن طريق معرفة أجزاء منه فقط. تظهر هذه الصورة تخمين الخوارزمية في الوسط، والنموذج الحقيقي ثلاثي الأبعاد على اليمين. المصدر: Ben Burchfiel
يقول طالب الدراسات العليا في جامعة ديوك Duck University بين بيورشفيل Ben Burchfiel: "لا يمكن للروبوتات الأكثر تطوراً في العالم أن تقوم بما يقوم به معظم الأطفال تلقائياً". إلا أنه وزملاءه قد اقتربوا من إيجاد الحل.
حيث طور بيورشفيل ومستشار الأطروحة الخاصة به جورج كونايدارس George Konidaris، الأستاذ المساعد لعلوم الحاسب الآلي في جامعة براون Brown University، تكنولوجيا جديدة تمكّن الآلات من استشعار الأجسام ثلاثية الأبعاد بطريقة أكثر بشرية. على سبيل المثال، يجب أن يكون الروبوت الذي يقوم بإزالة الأطباق عن الطاولة، قادراً على التكيف مع مجموعة هائلة التنوع من الأوعية والأطباق ذات الأحجام والأشكال المختلفة، المتروكة في حالة من الفوضى على سطح مبعثر.
يمكن للبشر بمجرد لمح جسم جديد، معرفة ماهيته بالفطرة، سواء أكان ذلك من الجانب الأيمن، أو كان مقلوباً أو موضوعاً بشكل جانبي، معروضاً بشكل كامل أو محجوباً جزئياً من قبل الأجسام الأخرى. حتى عندما يكون الجسم مخفياً بشكل جزئي، فإننا نقوم ذهنياً بملء الأجزاء التي لا يمكننا رؤيتها.
يمكن لخوارزمية الإدراك الجديدة التي ابتكروها والتي تختص بالروبوت، أن تخمن بشكل متزامن ماهية جسم جديد، وكيف يبدو من تفحصه من زوايا متعددة، كما يمكن لها أن تخمّن الأجزاء غير الظاهرة. على سبيل المثال، مع هذه التكنولوجيا فإن الروبوت لا يحتاج إلى رؤية جميع جوانب إبريق الشاي لمعرفة أن لديه مقبض وغطاء وفوهة، سواء أكان موضوعاً بشكل عمودي أو مائل على الموقد.
يقول الباحثون أن الاستراتيجية التي قدموها في 12 يوليو/تموز في مؤتمر العلوم والنظم للروبوتات عام 2017 Robotics: Science and Systems Conference، في مدينة كامبريدج في ولاية ماساتشوستس الأمريكية، قد قللت من كم الأخطاء، وزادت السرعة ثلاثة أضعاف مقارنةً بالطرق الحالية.
يضيف بيورشفيل: "تُعتبر هذه خطوة مهمة بالنسبة للروبوتات التي تعمل جنباً إلى جنب مع البشر في المنازل وغيرها من البيئات في العالم الحقيقي، والتي تكون أقل انتظاماً وقابليةً للتنبؤ من البيئات المتحكم بها في المختبر أو المصنع".
يُعطَى الروبوت عدداً محدوداً من نماذج التدريب ضمن مجاله، ويستخدمها لتعميمها على الأجسام الجديدة. يقول بيورشفيل: "من غير العملي أن نفترض أن لدى الروبوت نموذجاً مسبقاً مفصلاً ثلاثي الأبعاد لكل شيء يحتمل أن يصادفه".
طبق الباحثون خوارزميتهم على مجموعة بيانات مؤلفة من نحو 4000 مسح ضوئي ثلاثي الأبعاد لأشياء منزلية معروفة، تتضمن مجموعة متنوعة من أحواض الاستحمام والأسرّة والكراسي والمكاتب والمناضد والشاشات والطاولات والأرائك والمراحيض.
وقد تم تحويل كل مسح ثلاثي الأبعاد إلى عشرات آلاف المكعبات الصغيرة، أو الفوكسل voxels، المكدسة فوق بعضها كقطع الليغو LEGO، وذلك بهدف جعل عملية معالجتهم أسهل. وقد اكتشفت الخوارزمية أصناف الأجسام عن طريق المرور بأمثلة على كل جسم، ثم استنتاج الاختلاف والتشابه فيما بينها. وذلك باستخدام نسخة من تقنية تسمى تحليل المكونات الرئيسية المحتملة probabilistic principal component analysis.
عندما يكتشف الروبوت شيئاً جديداً -لنقل أنه سرير بطابقين- فلن يكون بحاجة إلى البحث في كامل القائمة الذهنية للمقارنة. فهو يتعلم من الأمثلة السابقة الخصائصَ التي تميل الأسرّة لأن تتسم بها. واستناداً إلى تلك المعرفة المسبقة، فإن لديها القدرة على التعميم كأي شخص، لفهم أن جسمين قد يختلفان، إلا أن الخصائص المشتركة تجعل منها نوعاً معيناً من الأثاث.
ولاختبار الاستراتيجية، قام الباحثون بتلقين الخوارزمية بـ 908 مثالاً جديداً ثلاثي الأبعاد، لنفس المواد المنزلية العشر التي ذكرناها في الأعلى.
من زاوية نظر واحدة، خمنت الخوارزمية ماهية الأشياء بشكل صحيح، وماهية الأشكال ثلاثية الأبعاد الكاملة التي ينبغي أن تكون عليها، بما في ذلك الأجزاء المخفية، 75% من المرات (أكثر الخوارزميات البديلة تطوراً نجحت بأكثر من 50%). كما كانت قادرة على التعرف على الأشياء التي تم تدويرها بطرق مختلفة، الأمر الذي لا تستطيع أفضل الخورازميات المنافسة القيام به. ويقول بيورشفيل: "في حين أن النظام سريع بشكل معقول -حيث تستغرق العملية برمتها ثانية واحدة تقريباً- إلا أنها لا تزال بعيدة كل البعد عن الرؤية البشرية".
قد تخدع بعض الأجسام الخوارزمية الجديدة والخوارزميات السابقة لها أيضاً، فهناك أجسام يمكن أن تظهر متماثلة من زاوية نظر معينة، فيمكن مثلاً أن يرى طاولة من الأعلى ويظن أنها سقف خزانة!
ويضيف: "إن معدل الأخطاء بشكل عام هو دون الـ25% بقليل معظم الوقت، بينما يبلغ معدل ارتكاب الأخطاء في أفضل البدائل 50%. لذلك تعتبر خوارزميتنا تطوراً كبيراً. لكنها ما تزال غير جاهزة للانتقال إلى منزلك، إلا إذا كنت تريد وضع وسادة في غسالة الصحون". ويعمل الفريق الآن على رفع مستواها لتمكين الروبوتات من التمييز بين آلاف أنواع الأجسام في كل مرة. ويقول بيورشفيل: "عمل الباحثون منذ زمن على تعليم الروبوتات التعرف على الأشياء ثلاثية الأبعاد".
ويوضح أن الجديد هو قدرتها على التعرف على الشيء وملء البقع المخفية لإعادة بناء الأجزاء التي لا تستطيع رؤيتها. ويقول بيورشفيل: "إن هذا يجعلها مفيدة في الكثير من التطبيقات".
