

المصدر: معهد ماساتشوسيتس للتكنولوجيا، مخبر علوم الحاسوب والذكاء الاصطناعي Massachusetts Institute of Technology, CSAIL.
ملخص
أغلب الوظائف في المصانع تتطلب تواجد العامل في مكان العمل للتحكم بالآلات، ولكن ماذا لو كان بالإمكان تأدية هذه الوظائف عن بعد؟
قدم الباحثون الآن نظام واقع افتراضي (Virtual-reality (VR يسمح بالتحكم بالروبوتات عن بعد عن طريق نظارات أوكيولوس ريفت Oculus Rift للواقع الافتراضي.
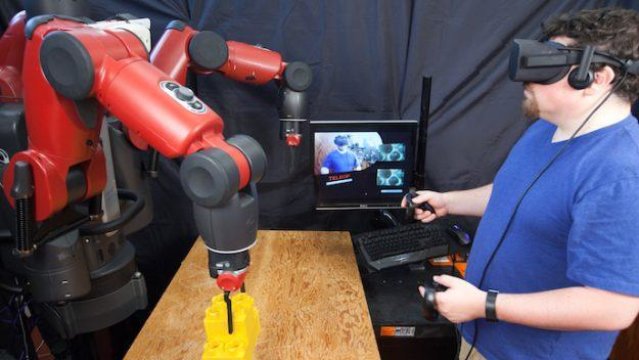
يوضع هذا النظام المُستخدم ضمن غرفة تحكم افتراضية تحوي واجهات متعددة للحساسات، مما يُشعر المستخدم وكأنه داخل رأس الروبوت، حيث يمكن للمستخدمين مطابقة حركتهم مع حركة الروبوت عن طريق إيماءات معينة لإنجاز مهام متعددة.
يقول جيفري ليبتون Jeffrey Lipton الأستاذ المساعد في مخبر علوم الحاسوب والذكاء الاصطناعي في معهد ماساتشوستس للتكنولوجيا MIT CSAIL، والمؤلف الأساسي للورقة بحثية المرتبطة بذلك النظام: "يمكن لنظام كهذا مساعدة الناس على إدارة الروبوتات عن بعد"، ويضيف: "من خلال التحكم بالروبوتات عن بعد يصبح بإمكان طبقة العمال العمل من المنزل والاستفادة من الثورة التكنولوجية كما تفعل طبقة الموظفين الآن".
كما يتخيل الباحثون أن نظاماً كهذا يمكن أن يساعد في توظيف محبي ألعاب الفيديو العاطلين عن العمل والذين تتزايد أعدادهم بشكل مستمر من خلال جعل الأعمال في المصانع شبيهة بتلك الألعاب.
أوضح الباحثون كيفية عمل أسلوب التحكم عن طريق الفيديو VC من خلال الروبوت باكستر الشبيه بالبشر Baxter Humanoid Robot من مختبرات ريثينك روبوتيكس Rethink Robotics، وأشاروا إلى أن أسلوب التحكم ذلك يمكن أن يعمل على أنواع أخرى من الروبوتات أيضاً كما أنه متوافق مع نظارة إتش تي سي فيف HTC Vive للواقع الافتراضي.
شارك ليبتون في كتابة البحث مع مديرة CSAIL دانييلا روس Daniela Rus والباحث أيدان فاي Aidan Fay، وقدّموا البحث في المؤتمر العالمي للروبوتات والنظم الذكية (International Conference on Intelligent Robots and Systems (IROS الذي أقامته IEEE/RSJ في مدينة فانكوفر Vancouver.
كيفية عمل النظام
في الماضي، كان هناك طريقتين أساسيتين لاستخدام الواقع الافتراضي في مجال التحكم عن بعد. في النموذج "المباشر" تُربط رؤية المستخدم مباشرةً بحالة الروبوت، إلّا أنّ تأخر الإشارات الحاصل يمكن أن يسبب غثيان وصداع، كما يكون مجال رؤية المستخدم محدوداً بنقطة واحدة.
في النموذج الافتراضي-الفيزيائي "Cyber-physical" يكون المستخدم منفصلاً عن الروبوت، حيث أنه يتفاعل مع نسخة افتراضية من الروبوت والبيئة. هذا النموذج يتطلب كميات أكبر بكثير من البيانات بالإضافة إلى مساحات عمل مخصصة.
يدمج النظام الخاص بفريق CSAIL بين النموذجين السابقين. هذا النظام يقوم بحل مشكلة التأخير، حيث أن المستخدم يستقبل بشكل مستمر استجابة مرئية من العالم الافتراضي. كما أنه يحل المشكلة الافتراضية-الفيزيائية المتمثلة في الانفصال عن الروبوت، حيث أن المستخدم بمجرد ارتدائه لنظارات الواقع الافتراضي سيشعر وكأنه داخل رأس باكستر.
يحاكي هذا النظام "نموذجاً مصغراً لعقل الإنسان" كتواجد إنسان مصغر داخل عقولنا يتحكم بكافة حركاتنا ويرى المشاهد التي نراها ويفهمها بالنيابة عنا. مع أن هذه الفكرة تعد غريبة بالنسبة للبشر، إلا أنها مناسبة جداً للروبوتات، فيوجد إنسانٌ في غرفة تحكم داخل كل روبوت يرى من خلال عينيه ويتحكم بحركاته.
باستخدام متحكمات نظارات أوكيولوس يمكن للمستخدم التفاعل مع أدوات التحكم التي تظهر في المساحة الافتراضية لفتح وإغلاق يد الروبوت حتى تقوم برفع وتحريك وجلب الأشياء. يستطيع المستخدم التخطيط للحركات بالاعتماد على المسافة بين مؤشر موقع الذراع ويده من خلال النظر إلى العرض المباشر للذراع. ولتحقيق ذلك، أُجري ربطٌ بين مساحة المستخدم والمساحة الافتراضية، ومن ثم ربطٌ بين المساحة الافتراضية ومساحة الروبوت مما يؤمن إحساساً بتشارك المكان.
بالإضافة إلى ذلك، يعد هذا النظام أكثر مرونة بالمقارنة مع الأنظمة السابقة التي تتطلب الكثير من المصادر، حيث قد يتوجب على أنظمة أخرى استخراج معلومات ثنائية الأبعاد من كل كاميرا وبناء نموذج كامل ثلاثي الأبعاد للبيئة، ومن ثم معالجة وإعادة عرض البيانات.
في المقابل، يستطيع النظام الذي بناه فريق CSAIL تجاوز كل ذلك من خلال عرض الصور ثنائية الأبعاد على كل عين (يتكفل العقل البشري بالباقي، حيث يستنتج المعلومات ثلاثية الأبعاد بشكل تلقائي).
قام الفريق في البداية بالتحكم بباكستر عن بعد وجعله يقوم بمهام بسيطة كحمل البراغي أو شبك الأسلاك بهدف اختبار النظام، ومن ثم حمل الكتل الثقيلة وصفها فوق بعضها. وتمكن المستخدمون من إنجاز المهام بمعدل أعلى بكثير بالمقارنة مع النموذج "المباشر"، وقد استطاع المستخدمون ذوو الخبرة في ألعاب الفيديو التعامل مع النظام بأريحية أكثر بكثير من غيرهم، وهو أمر ليس بالمفاجئ.
بعد اختبار نظام CSAIL ومقارنته بأنظمة متطورة وعالية المستوى تبين أنه متفوق في مجال رفع الأغراض بنسبة 95% وأنه أسرع بنسبة 57% في إنجاز المهام. كما برهن الفريق أن بإمكان النظام التحكم بالروبوت على بعد مئات الأميال، وذلك من خلال اختباره على الشبكة اللاسلكية الخاصة بأحد الفنادق في مدينة واشنطن وجعله يتحكم بباكستر المتواجد في معهد MIT (في مدينة ماساتشوسيتس).
يقول بروفيسور علوم الحاسوب في جامعة ستانفورد Stanford University، أسامة خطيب Oussama Khatib، والذي لم يكن من المشاركين بالبحث: "تمثل هذه المساهمة خطوة كبيرة في مجال ربط المستخدم مع مساحة الروبوت بطريقة ذكية، سلسة وفعالة".
يطمح الفريق إلى التركيز على جعل النظام أكثر تأقلماً بالسماح بتعددية المستخدمين ودعم أنواع مختلفة من الروبوتات المتوافقة مع تكنولوجيا التحكم المتوفرة حالياً.
مُوّل هذا المشروع من قبل شركة بوينغ Boeing Company ومؤسسة العلوم الوطنية National Science Foundation.
